For quantum computers to work, they need to be below what’s known as the fault tolerance threshold. This threshold tells us how much of a particular error a system can handle before quantum error correction fails.
But what kinds of errors can happen inside a quantum computer? And how are they different?
That’s what we’ll explore in this post.
Errors on data qubits
The simplest type of error is known as depolarizing noise. It scrambles the quantum information encoded in data qubits.
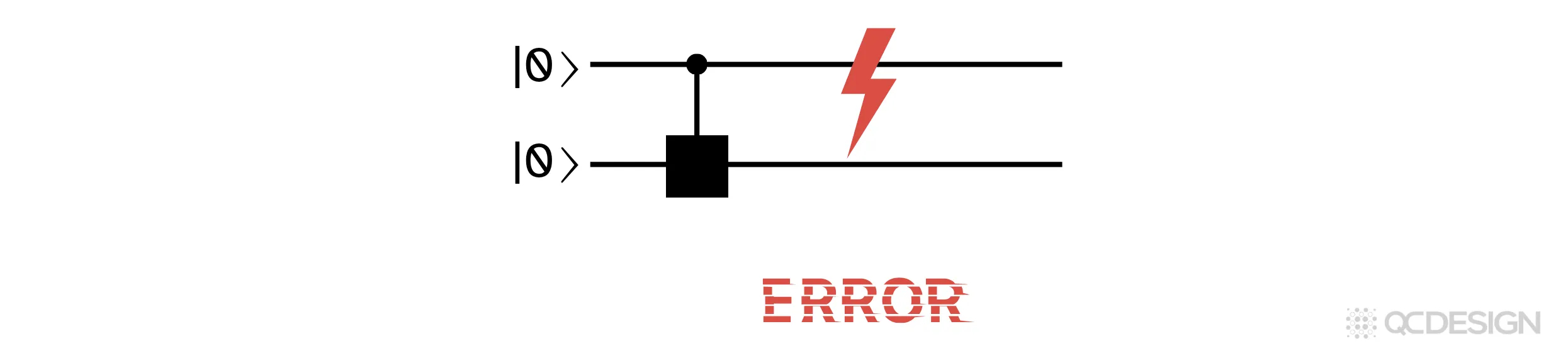
Some of the best codes available can handle depolarizing noise probabilities up to ~19%.
Measurement errors
We can also get errors when we measure qubits.
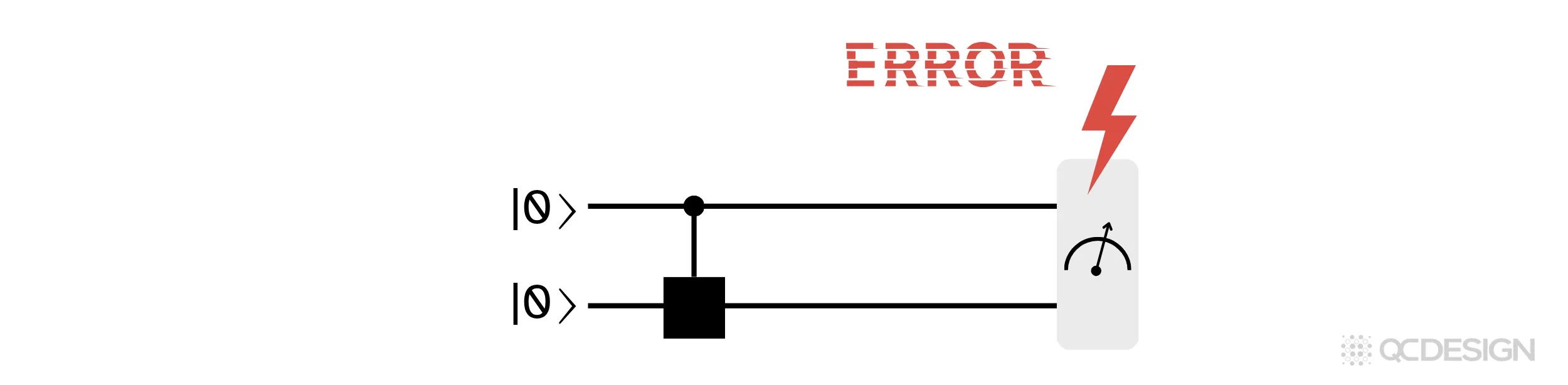
These errors can bring the threshold down from around 19% (for data qubits alone) to 3%. The drop is so dramatic because error correction relies on measurements to detect faults: if the detector is noisy, you can misidentify errors or miss them entirely, which undermines the whole correction process.
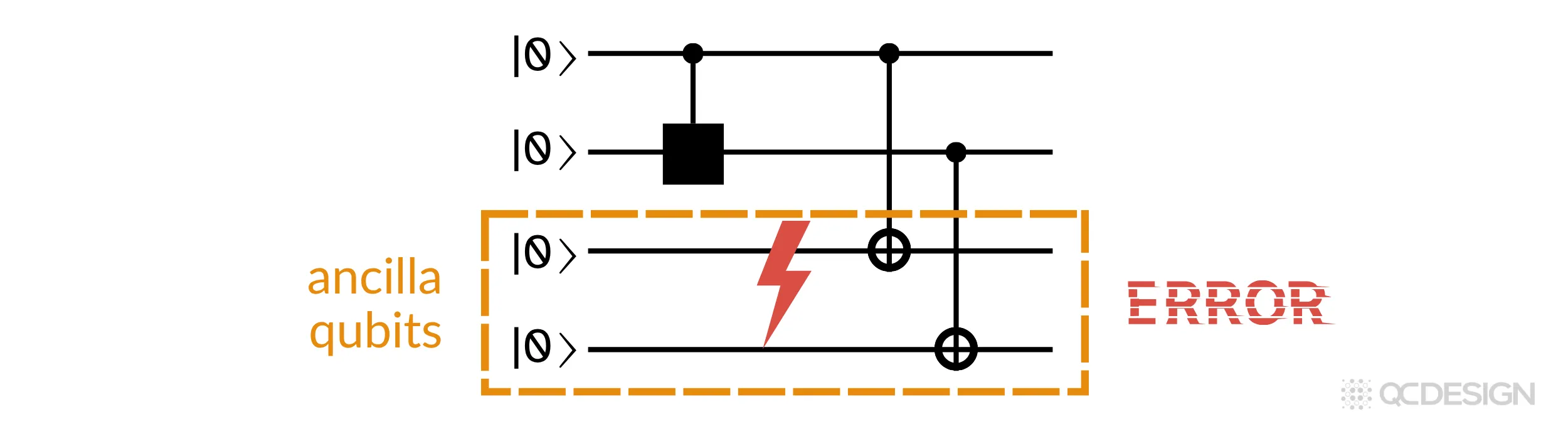
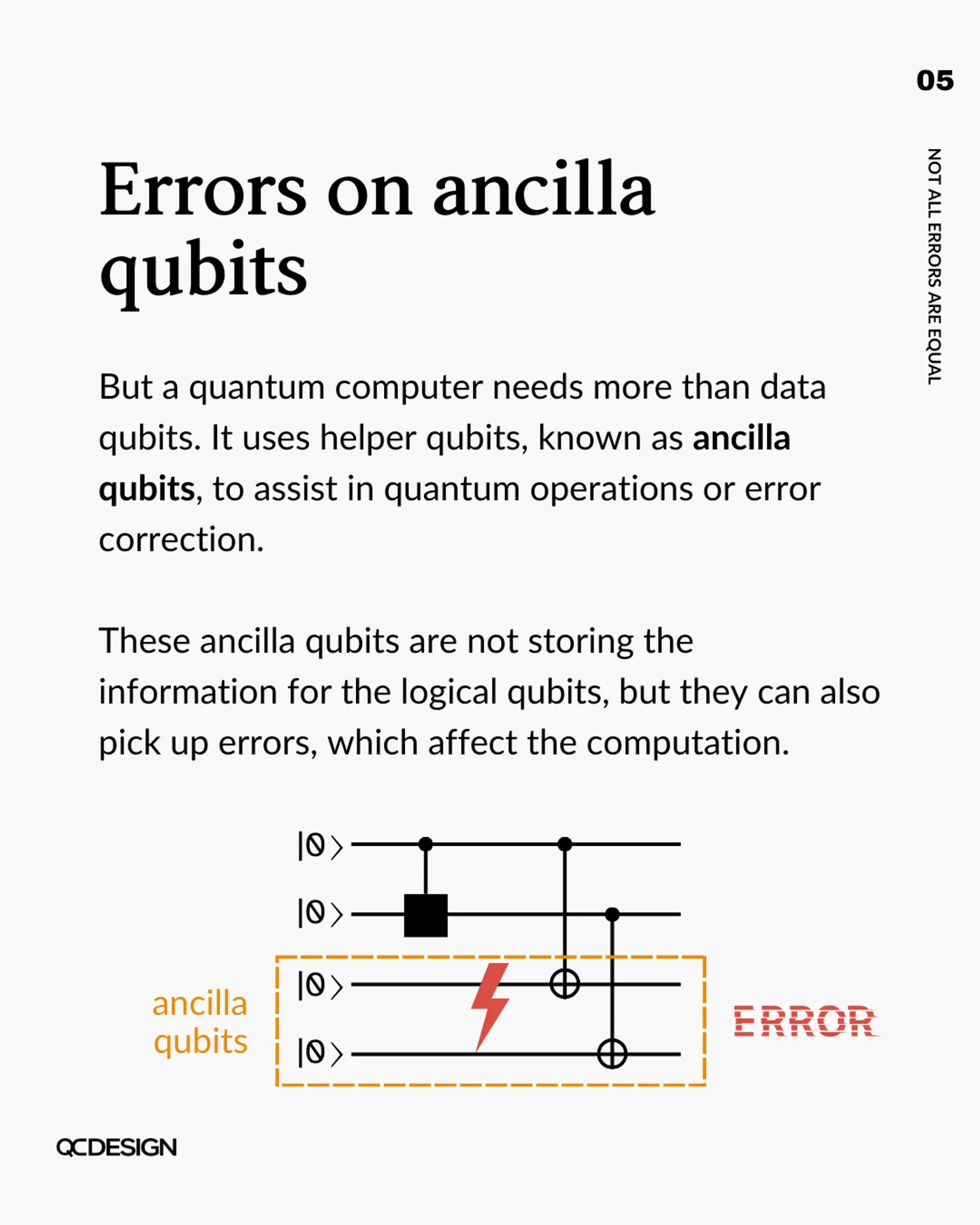
Errors on ancilla qubits
But a quantum computer needs more than data qubits. It uses helper qubits, known as ancilla qubits, to assist in quantum operations or error correction.
These ancilla qubits are not storing the information for the logical qubits, but they can also pick up errors, which affect the computation.
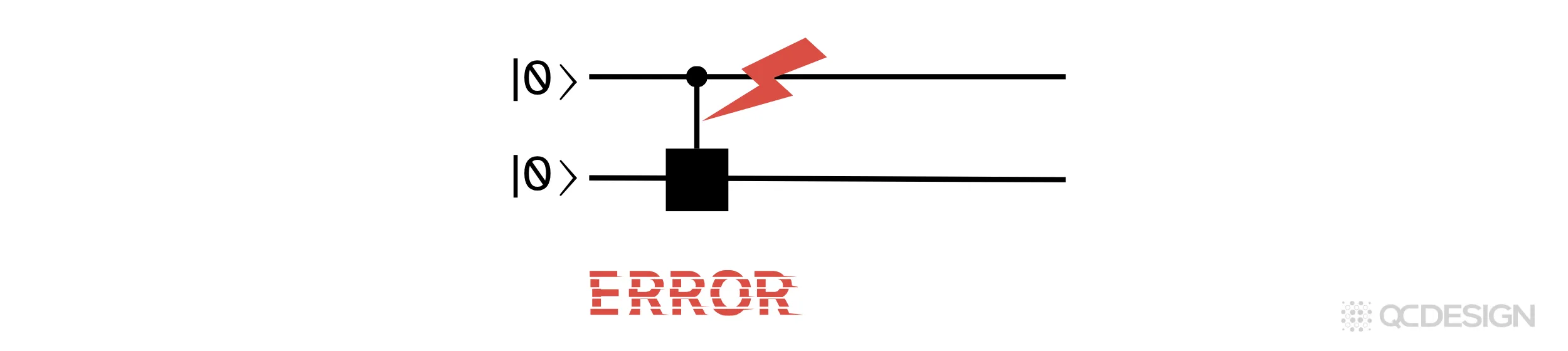
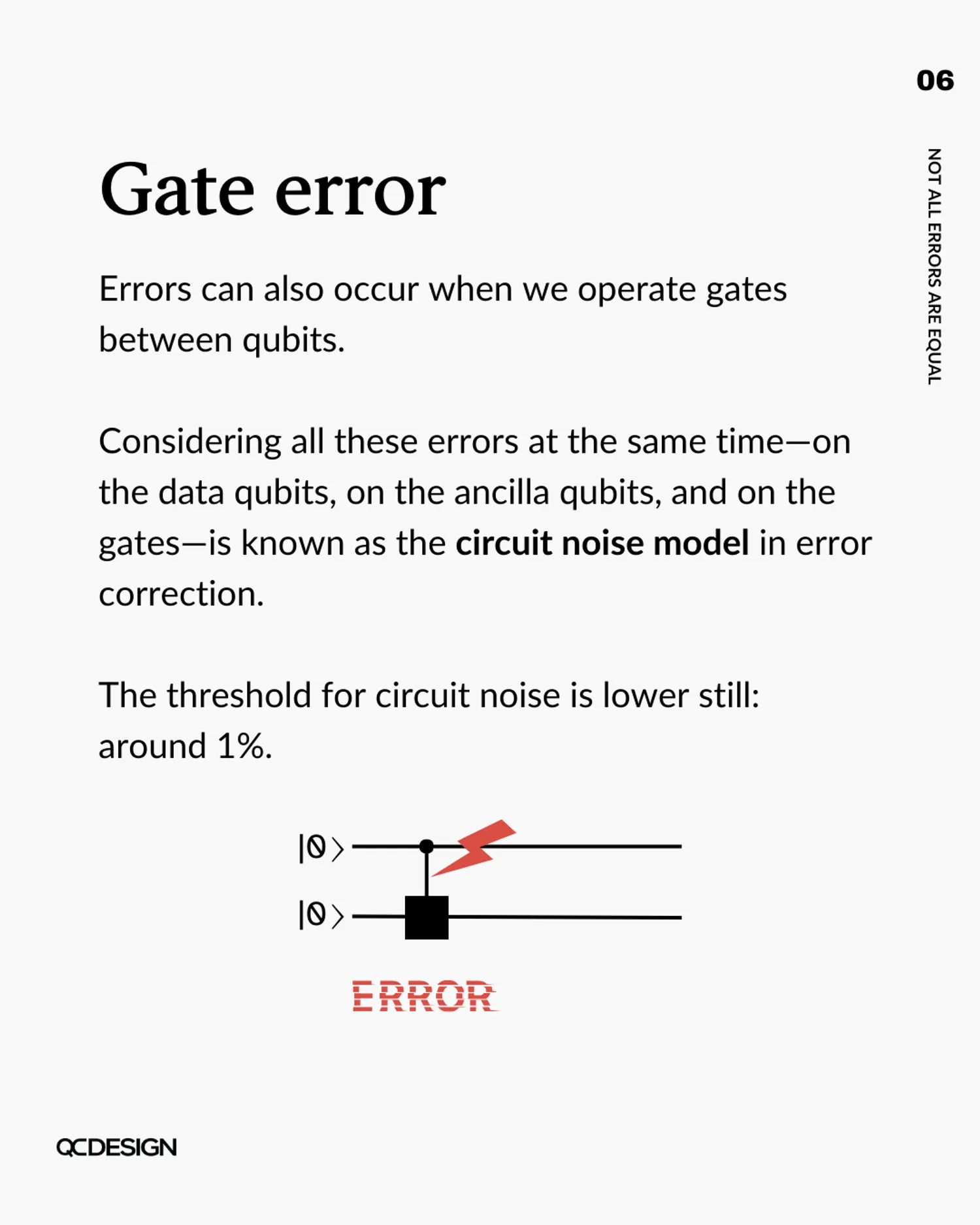
Gate errors
Errors can also occur when we operate gates between qubits.
Circuit noise model
Considering all these errors at the same time (on the data qubits, on the ancilla qubits, and on the gates) is known as the circuit noise model in error correction.
The threshold for circuit noise is lower still: around 1%.
These first four error types (on data qubits, measurements, ancilla qubits, and gates) aren’t independent categories. Each one adds to the previous noise model. That’s why the threshold keeps falling as you account for more of them: ~19% for data qubits alone, ~3% when you add measurement errors, and ~1% once ancilla and gate errors are included too.
To see how multiple error types interact when they’re all present at once, take a look at shifting error thresholds.
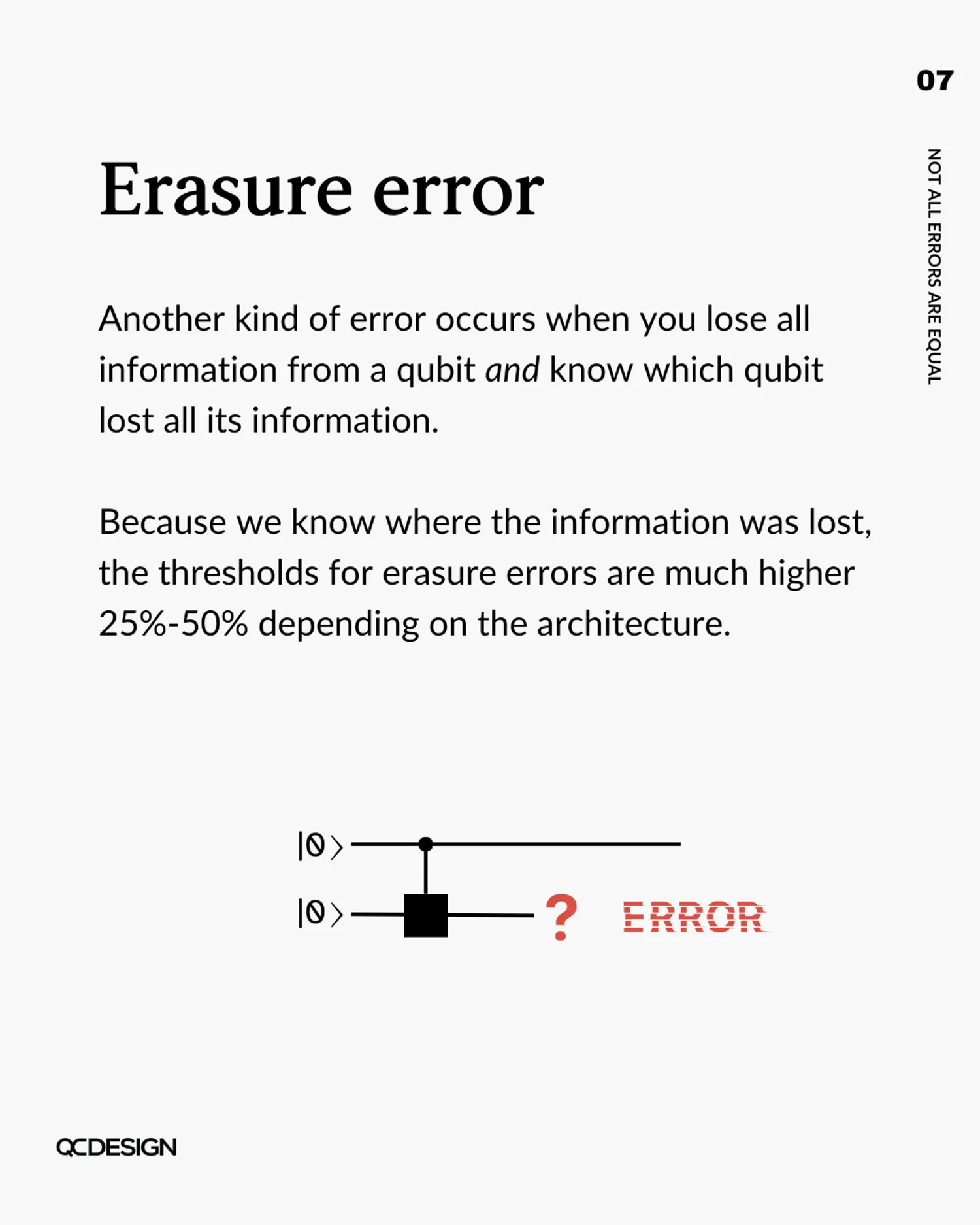
Erasure errors
Another kind of error occurs when you lose all information from a qubit and know which qubit lost all its information.

Because we know where the information was lost, the thresholds for erasure errors are much higher: 25%–50% depending on the architecture. The intuition is as follows: when you don’t know where an error occurred, the decoder has to deal with that lack of information; when you do know, you can target the correction directly. The location information helps!
Leakage errors
In qubits made of superconducting circuits or neutral atoms, physical qubits aren’t perfect two-level systems. Sometimes the information can leak into one of the higher levels, taking the qubit outside of the 0/1 basis.
This is known as a leakage error, a particularly onerous one since it has no threshold. What that means in practice is that even a very small leakage rate, left unaddressed, will eventually cause uncorrectable errors no matter how large you make the code. It’s categorically different from the other error types.
That’s why many teams are working on leakage mitigation, which restores a threshold.
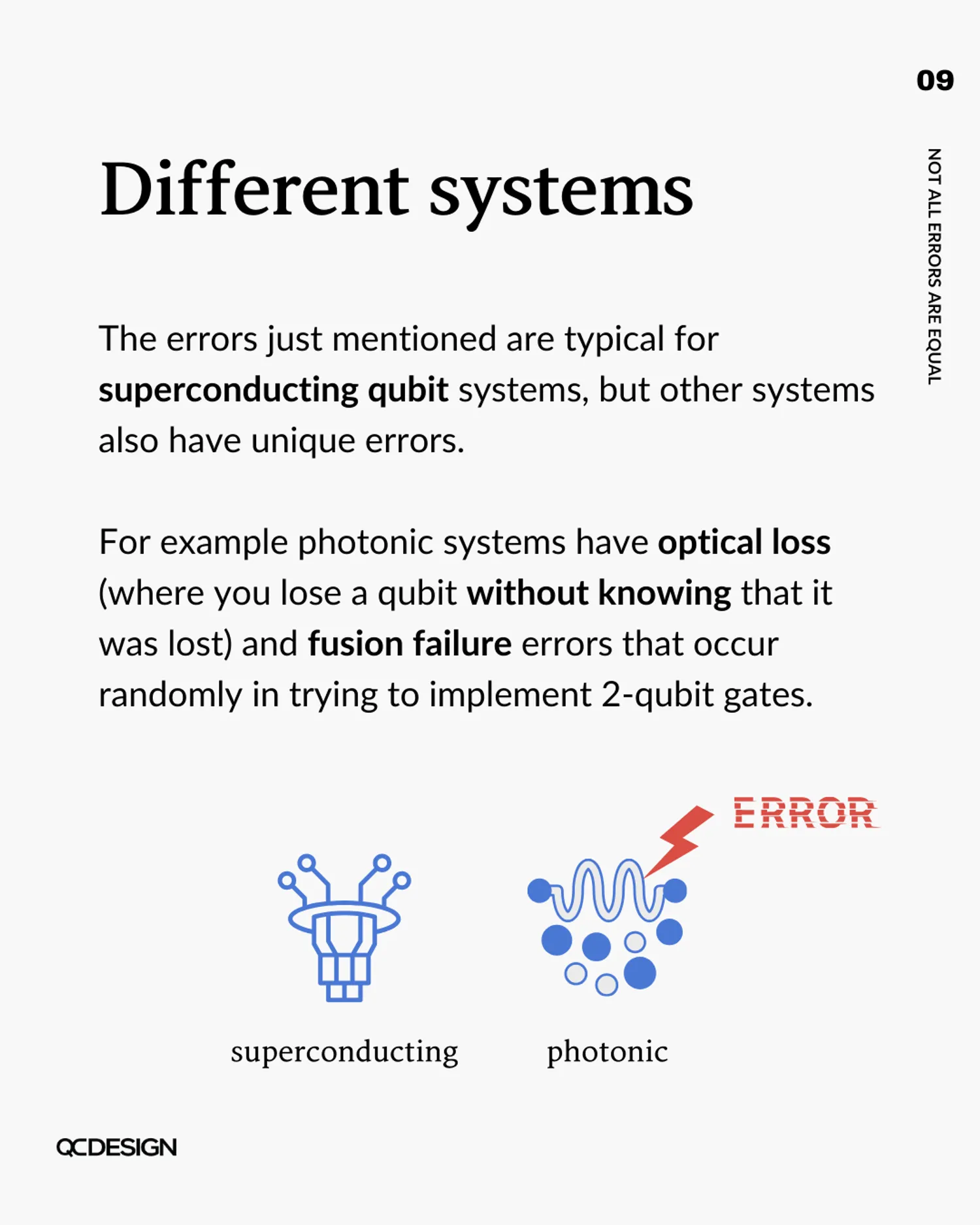
Different systems, different errors
The errors just mentioned are typical for superconducting qubit systems, but other systems also have unique errors.
For example photonic systems have optical loss (where you lose a qubit without knowing that it was lost) and fusion failure errors that occur randomly in trying to implement 2-qubit gates.
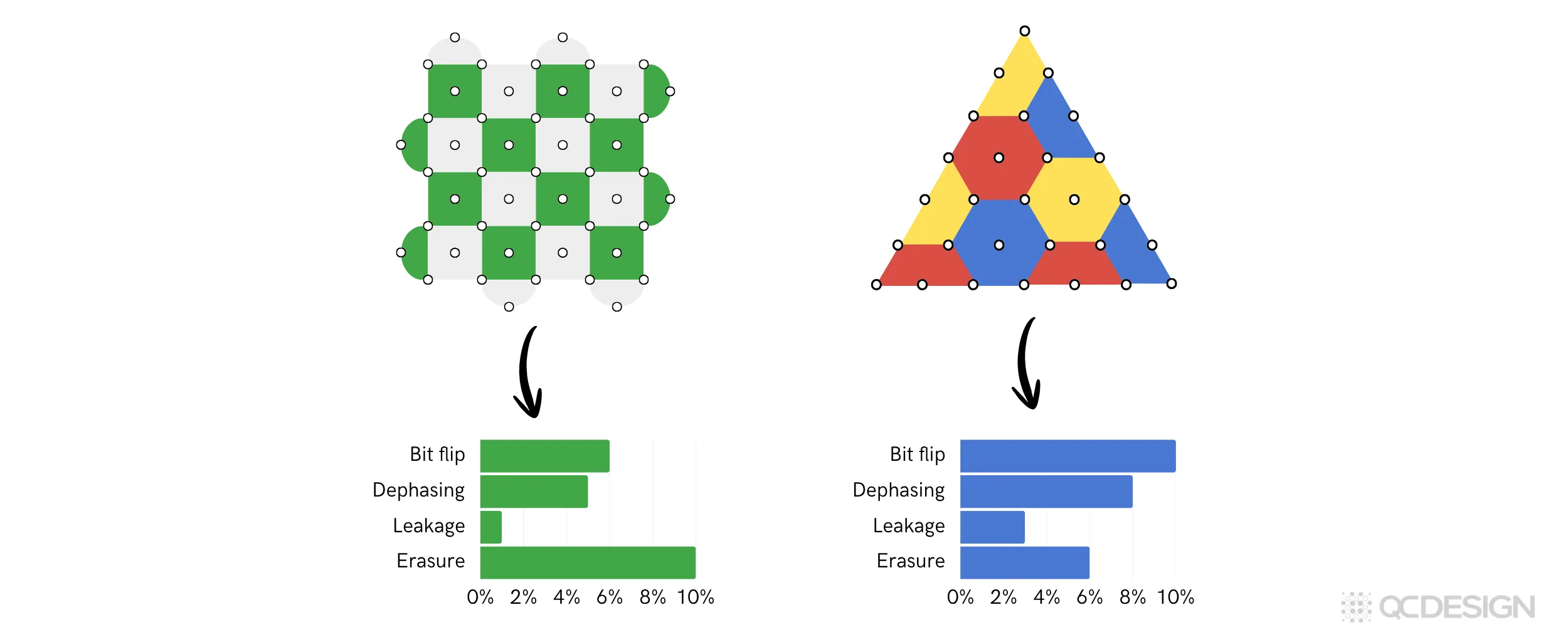
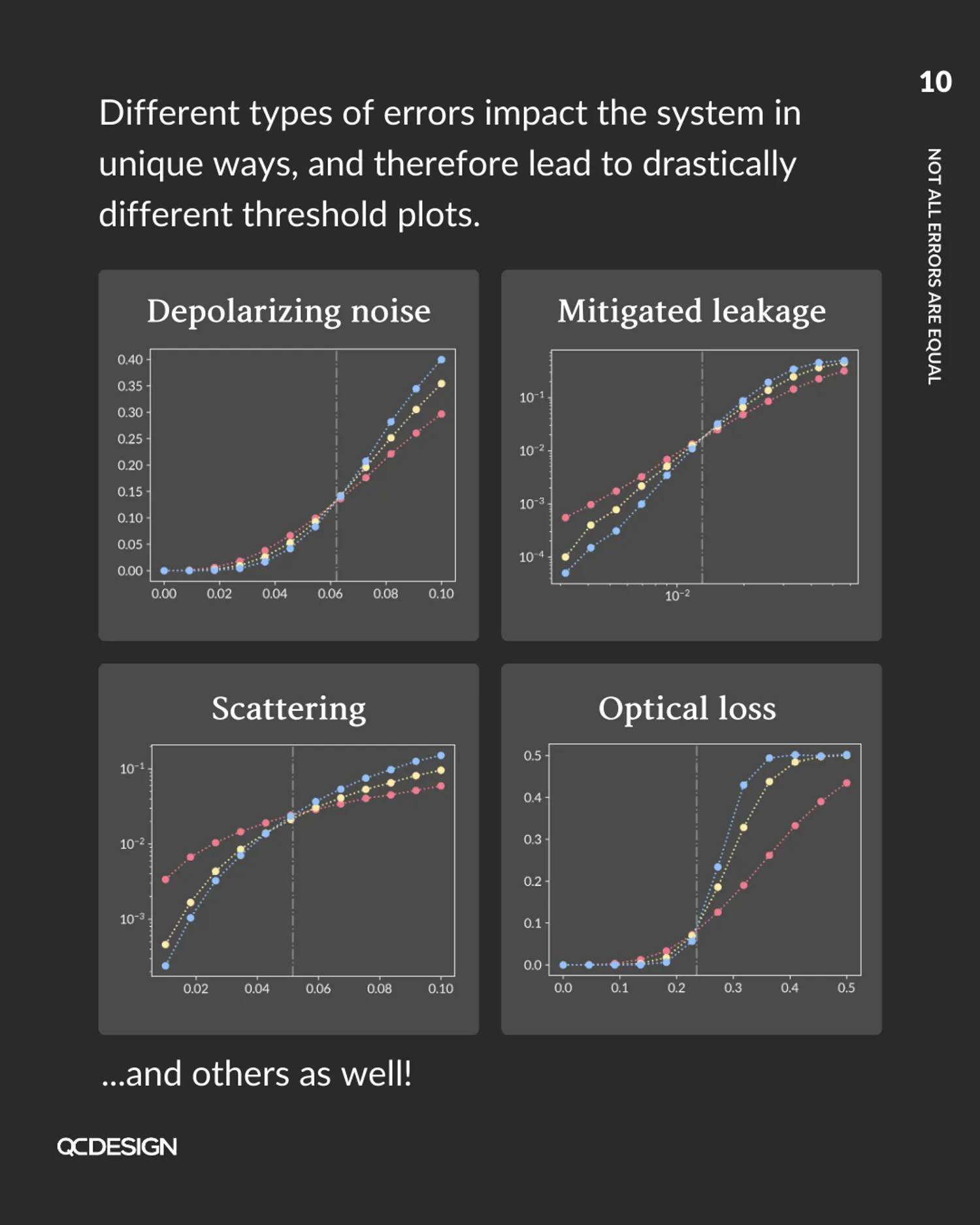
Different types of errors impact the system in unique ways, and therefore lead to drastically different threshold plots.
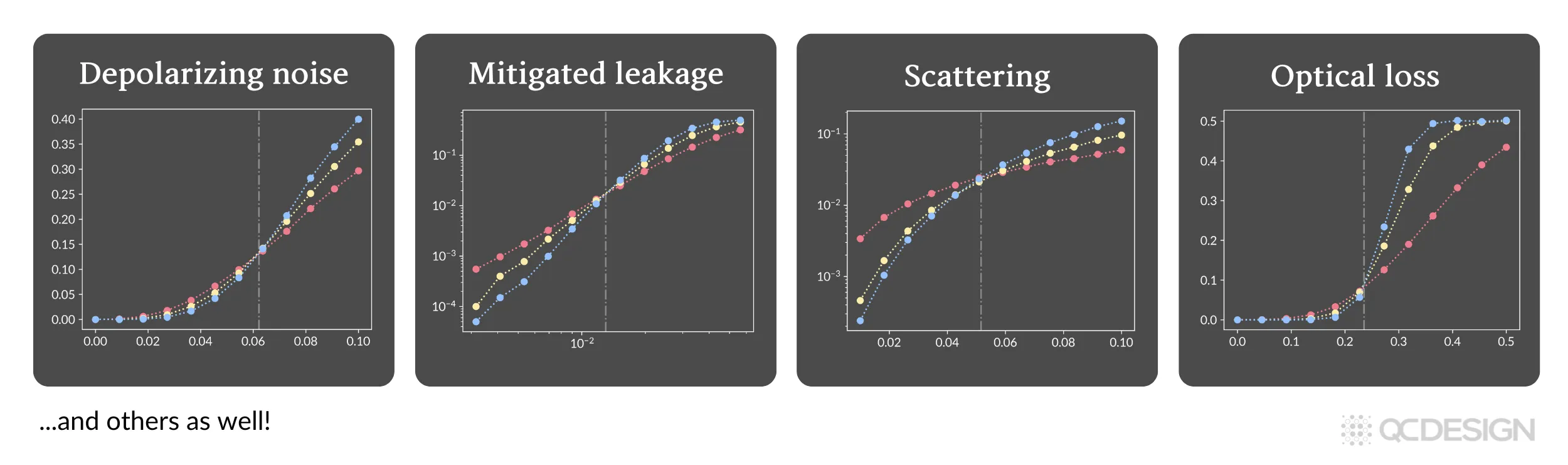
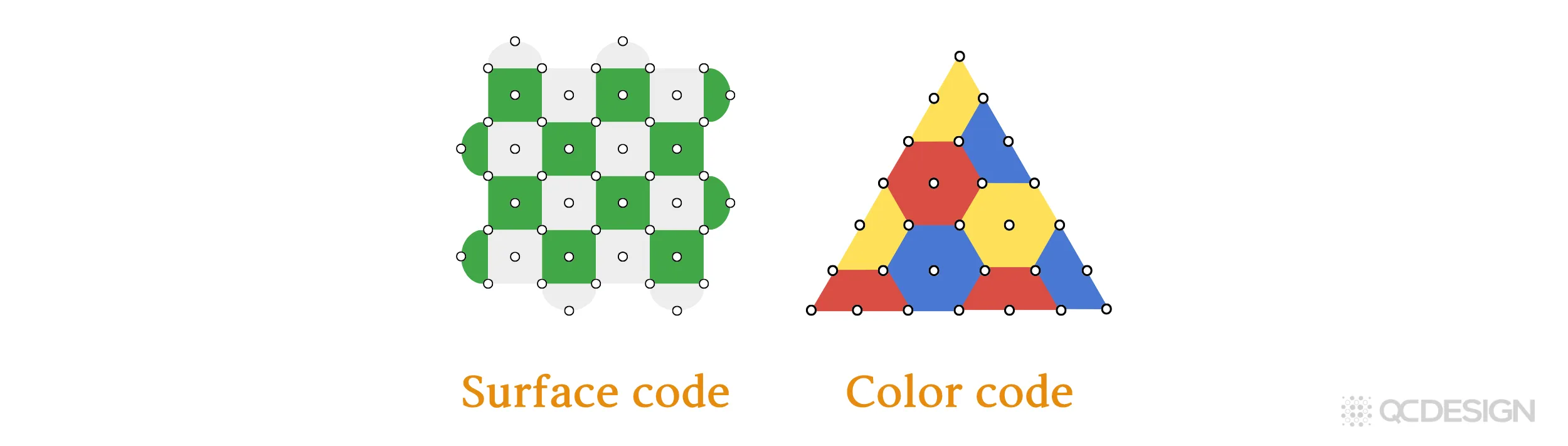
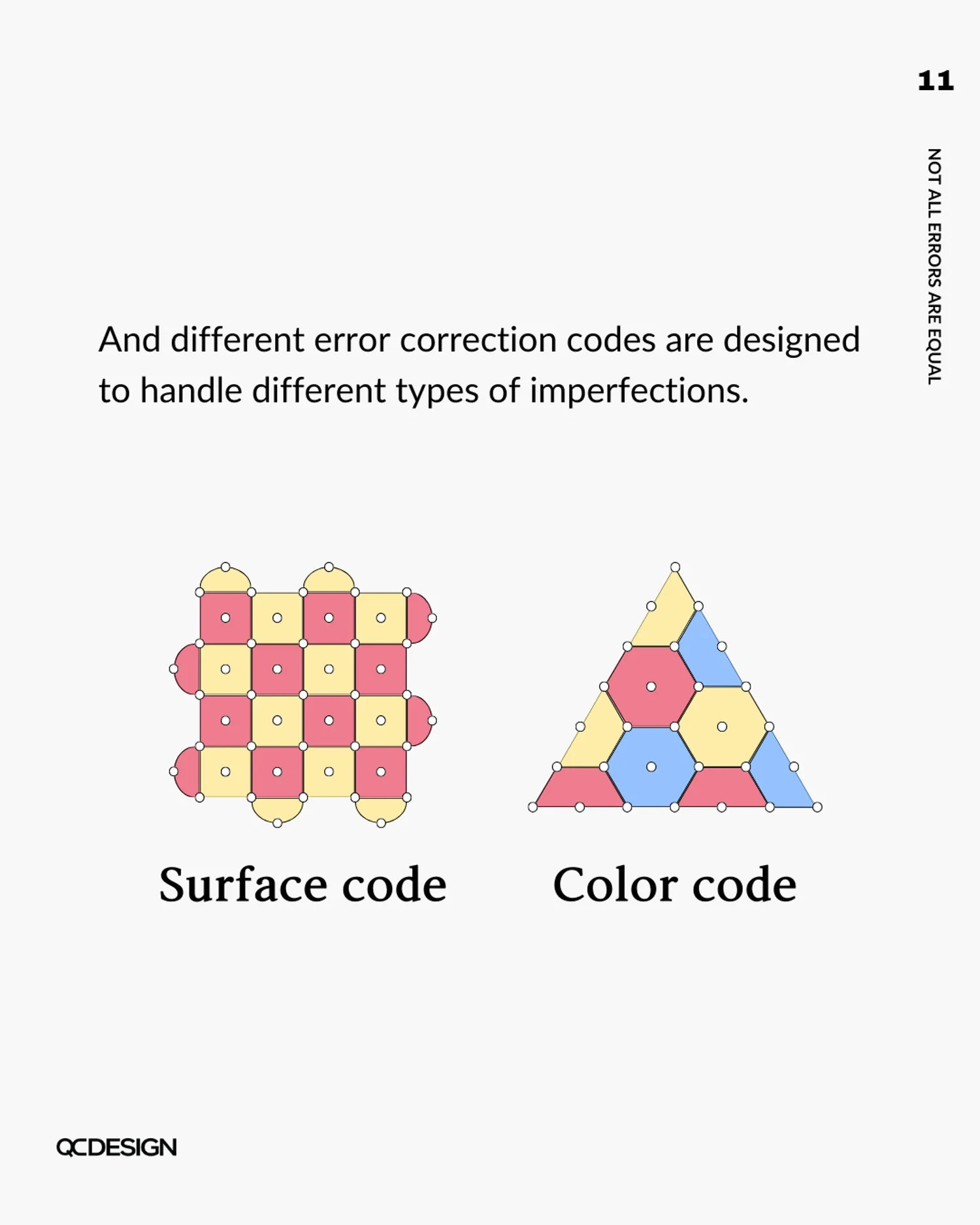
And different error correction codes are designed to handle different types of imperfections.
How Plaquette helps
Plaquette simplifies threshold calculations, making it easier to account for different types of error, so hardware teams can choose codes that match their system’s dominant errors.
If you’re curious how Plaquette can work for your platform, get in touch and we can share a demo.
Not ready yet? You can also join our practitioners mailing list to be notified when we release new features or publish technical content like this.





This post was originally published in February 2025 and updated in April 2026.